| 喜熊智控推出全自主無人載具飛控系統,打造AI 任務平台整合方案,讓AI飛上天! |
| |
|
| |
|
 |
667 |
|
| 最後更新時間:5月 | 17日 , 2026 |
|
| |
 |
 |
|
|
| 「砲聲一響,黃金萬兩」,用這句話來形容無人機產業是最為不過的,自從俄烏戰場上亮眼的表現,不對稱戰爭也由此開始推翻了傳統戰爭形式,同時也帶來了無人機的高光時刻,台灣無人機產業也日漸受到矚目。但台灣無人機產業過去常見的問題,是平台系統開發過度依賴既有開源架構,且許多技術基礎停留在數年前的版本,導致軟體智慧化發展速度相對有限。成立於 2025 年 2 月的喜熊智控,推出了涵蓋飛控、通訊、邊緣運算、AI 影像辨識、決策模型與雲端管理平台的完整應用方案。 |
| |

以全自主無人載具系統為核心,彌補台灣無人機軟體智慧化缺口
喜熊智控目前所推出的主力產品之一,便是全自主無人載具飛行系統。這套系統可應用於室內巡檢、室內搜救,以及需要在 GPS 訊號不足或環境干擾較高場域中執行任務的無人機應用。其系統核心包含自主決策模型、路徑規劃、多重定位、即時建模與 AI 影像辨識等能力,能讓無人機依照環境狀態即時判斷飛行方式,規劃較適合的任務路徑,並在飛行過程中持續更新環境資訊。在硬體架構上,喜熊智控將飛控、通訊與邊緣運算模組納入整體設計,並讓自研軟體直接部署於載具端。對於已經具備飛控與機構設計能力的客戶,喜熊智控可將自主飛行系統整合到原有平台,如若客戶僅具備機體或硬體架構,喜熊智控也能提供從飛控、通訊到機載電腦的完整核心套件,協助既有無人機產品快速升級為智慧化載具。
這種模組化做法,也是喜熊智控的重要訴求。無人機廠商或系統整合商不必重新打造整套載具平台,便能透過喜熊智控的核心軟硬體模組,加入自主飛行、AI 辨識、定位、建模與雲端管理能力。對安防、巡檢、工業場域與智慧建築應用而言,這代表無人機可被整合進既有系統架構中,成為固定監控、巡邏管理與異常通報流程的一部分。

七種定位系統整合,強化室內與強干擾環境飛行能力
在無人機自主化應用中,定位能力是能否穩定執行任務的關鍵。喜熊智控的系統整合七種定位方式,包含 GPS、視覺定位、BIM 建築資訊模型等不同資料來源,並以多重定位架構進行同步運算。當其中一種定位訊號受到干擾或發生異常時,系統可快速切換至其他定位來源,降低無人機在室內、強磁干擾或 GPS 訊號不穩環境中的漂移風險。特別適合應用於智慧建築、工廠、倉儲、地下空間、能源場域與大型室內設施。喜熊智控指出,當 BIM 系統與無人機定位結合後,無人機可透過建築模型掌握自身在室內空間中的相對位置,進一步提升室內巡檢與搜救任務的可行性。對於過去仰賴人員巡查的場域,這類自主定位能力可讓無人機更容易進入複雜空間,協助執行重複性高、風險較高或人力成本較高的任務。
全自主無人機巡檢機站,讓保全與場域管理走向自動化
喜熊智控今年主推的商用方案,是全自主無人機巡檢系統機站。這套方案可視為無人機的自動化機場平台,支援自動起飛、自動返航與自動充電,並可串接雲端平台進行即時監控。未來管理人員可在中控台監看無人機任務狀態,由無人機依照排程或事件觸發自動巡邏,當系統偵測到異常狀況時,再即時通報管理人員。這項方案將無人機從「需要人操作的設備」推進到「可納入日常管理流程的自主巡檢」。在工廠、園區、倉儲、校園、能源設施與大型建築場域中,無人機可依照固定路線或任務條件執行巡邏,並將即時影像、飛行狀態、任務進度與異常事件回傳至雲端平台,協助管理單位提升巡檢效率與反應速度。與機站搭配的 Cloud Scene 平台,則扮演任務管理與視覺化中控平台的角色。使用者可在平台上查看機站位置、無人機目前任務、飛行狀態與即時影像,也可在必要時介入控制。這讓無人機巡檢不再只是單點設備運作,而能被納入集中式監控架構,與安防系統、場域管理平台或其他營運系統進行整合。

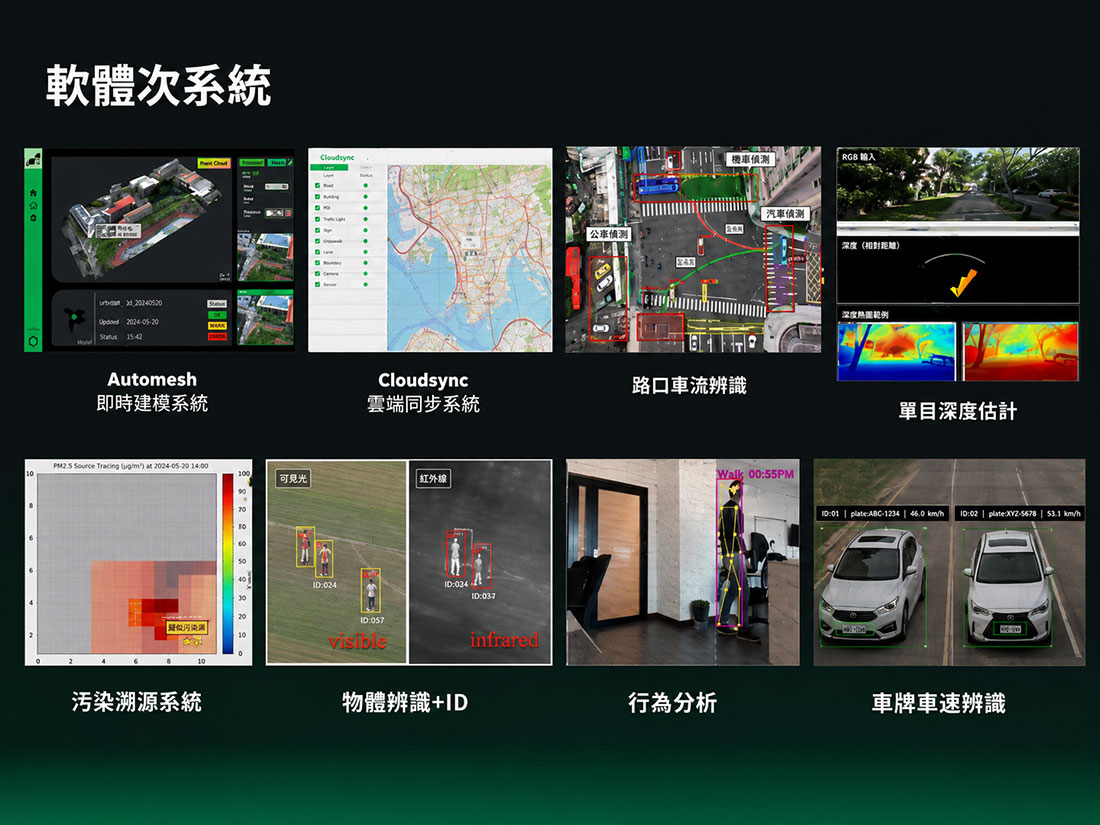
即時建模與單目深度技術,提升任務現場判讀速度
傳統無人機建模流程通常需要先完成拍攝,再將照片或資料取回電腦端進行後處理,建模過程可能需要一至兩小時。喜熊智控的即時建模系統,可在無人機飛行過程中同步建立環境模型,雖然即時模型精細度不一定等同於完整後處理成果,但能快速呈現空間相對位置,讓任務指揮或現場管理人員更快掌握環境狀態。
喜熊智控也發展單目深度技術,透過 AI 演算法讓單一鏡頭產生深度資訊。一般深度估測多仰賴雙鏡頭或其他深度感測器,喜熊智控則是利用單光學鏡頭建立深度模型,讓無人機在較低硬體成本下取得空間判斷能力。對於載重、耗電與機體空間受限的無人機而言,這類演算法可降低硬體配置門檻,並支援避障、定位、建圖與環境理解等應用。
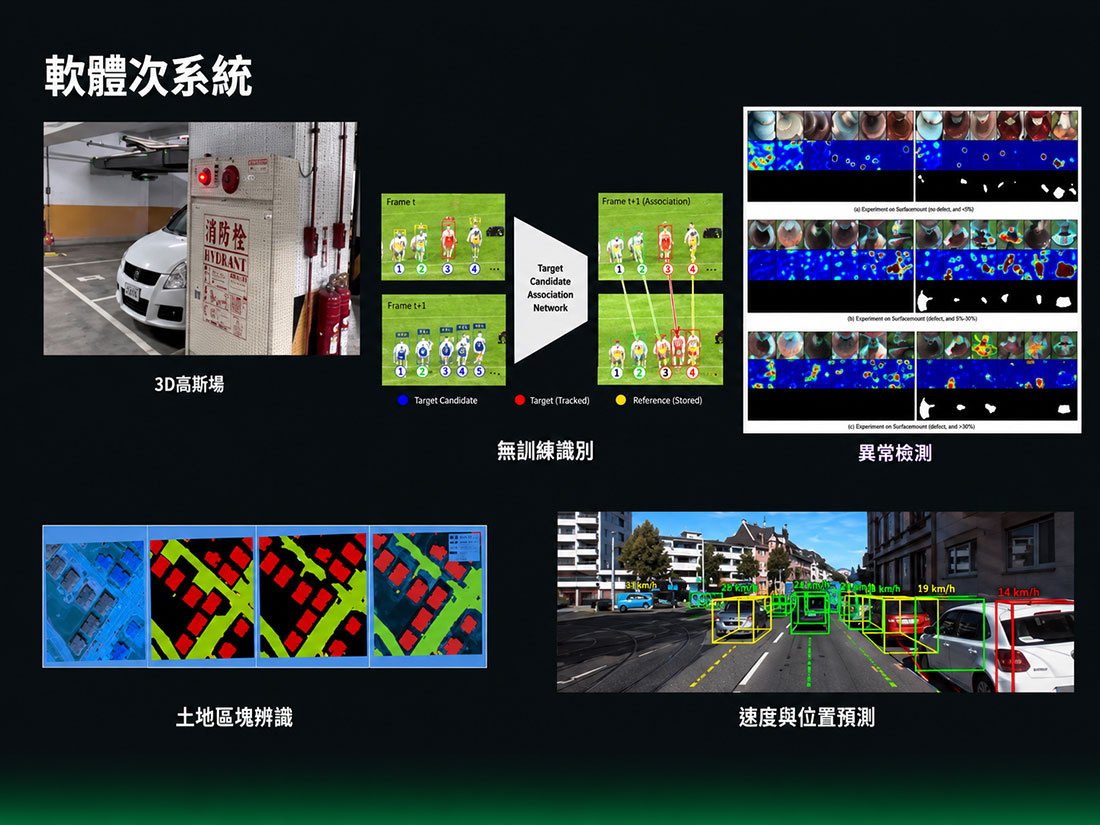
從 AI 影像辨識到污染溯源,拓展安防與工業應用場景
喜熊智控的AI 影像辨識與客製化模型也是其重要能力。團隊目前已開發一般物體辨識、行為分析、車牌辨識、車速辨識、人臉辨識、破損檢測、風力發電機巡檢、橋梁破損檢測等模型,並可依照不同場域需求進行客製化調整。這些 AI 模組可部署在無人機端、地面端或雲端,依據任務需求與運算資源選擇合適架構。而在智慧安防應用領域,無人機可搭配 AI 辨識能力進行人員、車輛、船舶或特定目標偵測,也能針對異常行為進行分析。例如系統可先判斷人員是否出現在特定區域,再進一步分析肢體動作與場景脈絡,用於違規行為偵測或場域管理。對於交通與城市管理場景,喜熊智控也曾投入路口車流辨識、車牌車速辨識等應用,讓影像分析成果可延伸至交通流量監測與智慧交通管理。
環境監測則是因為團隊成員具備環境工程背景,因此也將無人機與環境監測結合,發展污染溯源系統。當無人機飛越工業區或特定監測區域後,系統可依照污染濃度分布推估高濃度位置,協助回推可能的排放源。這類應用可望服務於環保稽查、工業區管理、空污監測與災害應變,讓無人機從影像巡檢進一步延伸到環境數據分析。
多模態、3D 高斯場與無識別追蹤,強化未來智慧巡檢能力
喜熊智控也將多模態 AI 與大型語言模型結合,讓使用者能以自然語言描述需求,要求系統在影像場景中尋找特定物件。例如使用者可詢問畫面中有哪些物體,或要求系統尋找狗、樹木、車輛等目標,系統便能根據語意理解與影像內容進行判斷。這類能力將有助於降低操作門檻,使非技術人員也能透過語言指令調用影像分析功能。
此外,喜熊智控也發展無識別訓練的目標追蹤能力。使用者可直接框選目標,系統便依照特徵點進行追蹤,不需要事前針對該物件完成 AI 訓練。這對於臨時任務、未知物追蹤、安防巡邏與現場應變相當重要,因為許多任務目標無法在事前建立完整資料集。透過這種即時框選與追蹤機制,無人機與影像系統可更快回應現場需求。
以客製化研發能力,回應不同場域的實際需求
喜熊智控受訪時強調,其所具備的技術優勢在於能夠依照客戶需求修改與調整演算法,而不是將現成產品直接套用到不同環境。團隊會先研究相關文獻與演算法,再依照實際應用場景進行測試、整合與調校,形成適合該場域的系統。這對無人機與 AI 影像分析尤其重要,因為不同場域的光線、地形、飛行條件、目標型態與任務需求差異很大,若缺乏客製化能力,實際導入效果往往會受到限制。
目前喜熊智控已與多個技術夥伴、學研單位及無人機相關業者合作,包含台灣無人機產業鏈廠商、工研院、成功大學、中正大學等單位。其研發方向涵蓋自主飛行系統、即時建圖、風力發電機巡檢路徑規劃、BIM 室內定位與智慧巡檢應用。團隊成員背景則橫跨帝國理工大學、史丹佛大學、杜倫大學、加州大學及雲科大等學研體系,研發經驗從 4 年到 25 年不等,形成以 AI、飛控、影像、環境與工程應用為基礎的技術組合。

喜熊智控表示,透過自研飛控、通訊、機載電腦與 AI 模組,補足台灣無人載具在自主決策、室內定位、即時建模與任務平台整合上的關鍵能力,可以讓無人機從單純的飛行載具,進一步成為可自主巡檢、辨識異常、回傳資訊並支援決策的智慧化系統。相較於傳統無人機產業多以硬體機構為主,喜熊智控將發展重點放在軟體演算法、深度學習模型與自主決策能力,讓既有無人載具透過核心模組升級,具備接近國際水準的自主飛行與執行智慧任務的能力。 |
| |
| ※本文圖文非經授權不得轉載,洽詢授權,請E-Mail至contact@aimag.tw[ iDS智慧安防雜誌聲明 ]※ |
| |
| |
|
| |






















































